
雑科学ホーム
hr-inoueホーム
● モーターの話 ●
運動を引き起こす機械
モーター(motor)とは、運動(motion)を引き起こす機械です。その意味では、ガソリンなどの液体燃料で動くエンジンや、そのエンジンを積んだ自動車の類も「モーター」と呼ばれますが、ここではもっと狭い意味で、主として電気を使って動く「電動機」について書くことにします。狭い意味と言っても、その種類は様々で、短い記事の中で書き尽くすことはとてもできませんが(それだけの知識もありませんし)、とりあえず代表的なモーターの原理や特徴を大まかに紹介しますので、あとは専門の参考書を見てください。
模型でおなじみの直流モーター
普通に「モーター」と言って想像するのは、模型の車や船などに使う小型の直流モーターでしょう。これの原理は中学校の理科で習うと思いますが、一応、図1で簡単におさらいしておきましょう。
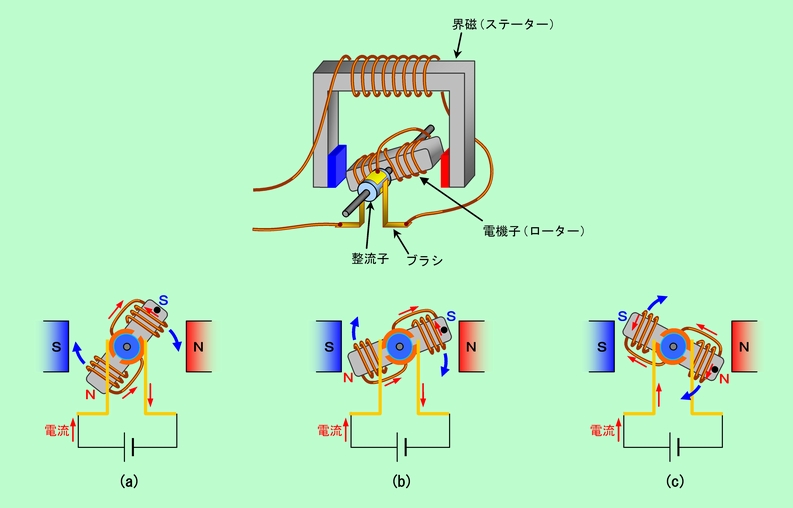
図1 一般的な小型モーターの原理
モーター本体は、中で回転するローター(電機子、アーマチュア)と、外側に固定されたフィールド(界磁、ステーター)から成っています。ローターは鉄芯にコイルを巻いた電磁石(
磁石の話参照)で、導線の端は整流子と呼ばれる筒状の金属片(整流子片)につながれています。図1のモーターは2極型ですから、整流子片も2つに分かれています。整流子片はブラシと呼ばれる別の導体に接触しており、ここから電流が供給されます。電源をつなぐと、電流はブラシから整流子片を通ってローターに巻かれたコイルを流れ、もう一方の整流子片から反対側のブラシを通って出て行きます。
初めにローターが図1(a)の位置にあったとしましょう。電流は左のブラシから橙色の矢印のようにコイルを流れますので、ローターの下側がN極、上側の●を付けた方がS極になります。この時、フィールドの右がN極、左がS極であったとすると、ローターは磁力に引かれて青矢印のように回転します。この状況は図1(b)のところまで回転しても変わりませんが、ローターの極性がこのままでは、もう少し回って真横になった時点で止まってしまいます。ところが実際には、真横に向いた瞬間にピタッと止まることはなく、多少は行き過ぎて図1(c)のようになります。その途端、これまで左のブラシに接触していた整流子片が右のブラシに、右のブラシに接触していた整流子片が左のブラシに接触することになりますから電流の入口と出口が逆転し、ローターのコイルを流れる電流が逆向きになって、N極、S極がひっくり返る(●がN極になる)のです。こうなると、これまでフィールドの右側に引っ張られていた●の極が逆に反発されますから、ローターはさらに同じ方向に回転を続けることになります。このように、半回転ごとにローターの極性が反転することで回転を続けるのが直流モーターです。
極性を反転させる必要があるのはローターだけですから、フィールドの方は永久磁石でも構いません。実際に、模型用の小型モーターのほとんどは、フィールドに永久磁石を使っています。ただ、フィールドに電磁石を使った図1の方式ですと、直流だけでなく交流でもちゃんと動く、というメリットがあります。フィールドが永久磁石のモーターに交流を流すと、整流子の作用と関係なく1秒間に50回や60回極性の反転が起こりますから、ローターはガタガタと振動するだけになってしまいます。これに対してフィールドを電磁石にすると、ローターの極性が交流で反転するのと同時にフィールドの極性も反転しますから、結局引き合う方向に変化はなく、モーターは回り続けるのです。また、永久磁石では磁力は一定で、その強さにも限界がありますが、電磁石では電流の大きさで磁力が自由に変えられます。そのため両方とも電磁石のタイプの方が制御もしやすくパワーも出しやすい、ということで、大型の実用モーターには電磁石タイプのものが多く使われます。
ローターやフィールドの鉄芯は単なる鉄の塊ではありません。普通の鉄ですと、コイルに電流が流れて磁化するときに内部で渦状の電流が発生し、エネルギーを消費してしまうのです(投入した電気エネルギーが効率よく磁気エネルギーに変換されずに無駄になります)。そこで、このような損失が少ない、ケイ素を含んだ電磁鋼板が鉄芯として使われます。それも無垢の塊ではなく、表面に電気を流さない塗料を塗って絶縁した薄い板を積み重ねて、内部で電流が流れにくい構造にしています。
ところで、図1の2極タイプのモーターでは、ローターが真横になった状態では始動できませし、力も出ない、ということで、実際のモーターではほとんど3極タイプ(またはそれ以上の極数)のローターが使われています。3極ローターの動作を図2に示しました。
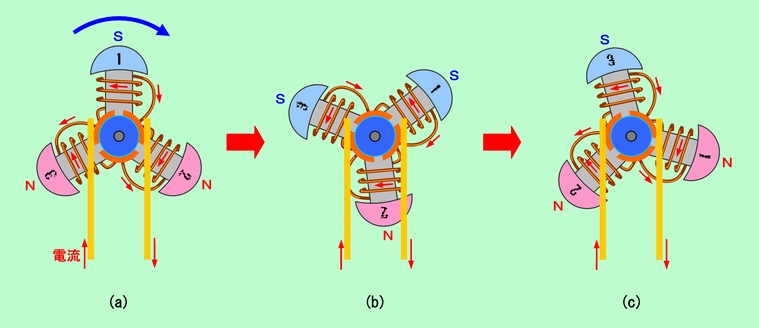
図2 3極ローターの動作
各極に巻かれたコイルの両端は、それぞれ隣り合った整流子片に接続されています。ローターの回転につれて各極の極性が図のように変化しますが、常に3つの内の2つが同じ極性で、残りの一つが逆の極性になる状態が作られます。この図のケースですと、上半分に来た極がS極、下半分に来た極がN極になることがわかります。このように、3極ローターでは少なくともどれかの極はフィールドに対して斜めの位置に来ますので、ローターがどの位置にいても必ず回転力が働くのです。
余談になりますが、パワーはともかく、とりあえず回るだけでよければ、簡単にモーターを作ることができます。図3に示したような非常に単純な構造のもので、工作の本などにもよく紹介されているので見たことがある人も多いでしょう。ローターに鉄芯はなく、エナメル線を巻いたコイルだけで、その両端が回転軸も兼ねています。軸部分のエナメル線の一方は被覆を完全に剥いていますが、もう一方は半分だけ被覆を残しており、これが整流子片(の片側)になります。またブラシは針金(クリップなどが手ごろ)を曲げて作った軸受けが兼ねています。
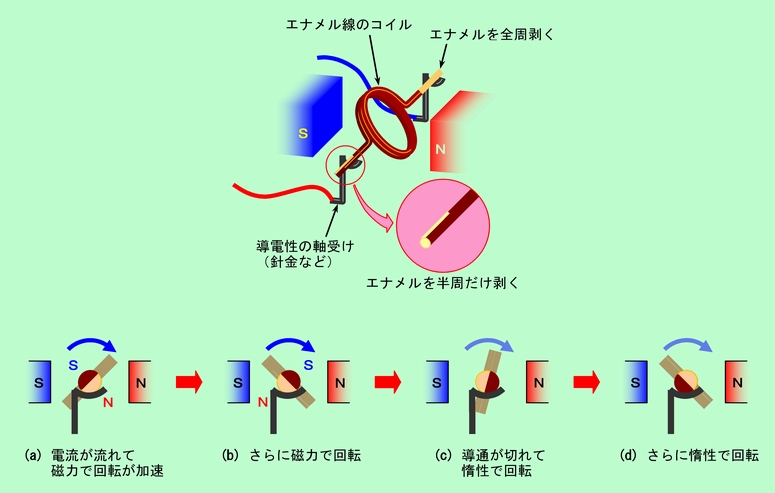
図3 回るだけならこれで十分 ― 超簡単モーター ―
初めに図3(a)の状態であったとしましょう。この状態ではエナメル線の被覆を剥がした部分が軸受けに接していますから、軸受けを通してコイルに電流が流れてローターは弱い電磁石になり、フィールドとの間に働く磁力によって回転を始めます。ところが図3(b)の状態を過ぎ、勢い余って図3(c)の状態になると、エナメル線の被覆された部分が軸受けに当たりますから、電流は流れなくなります。こうなるとフィールドの磁石とは作用しませんから、ローターはただ単に惰性で回るのみです。しかし、うまく図3(d)の状態を通過して図3(a)の状態まで戻ると、再びコイルに電流が流れ始めて、また回転力を与えられるのです。つまり、図1のモーターが半回転ごとに極性を切り換えて回転力を得るのに対して、図3のモーターでは1周の内の半分だけ力をもらい、残りの半分は休んでいる(惰性で回っている)のです。当然、回転力は弱いですし、図3(c)や(d)の状態からはスタートしませんから、初めに手で回して勢いをつけてやらなければなりません。
ここで紹介したモーターは(図3のガイコツのようなモーターは別にして)始動時のパワーもあり、回転速度も制御しやすいので広く使われていますが、整流子とブラシが常に擦れあっていますから磨耗が起こりやすい、という欠点があります。そこでローターを永久磁石にして整流子やブラシを無くしたモーターがあります。この場合、ローター側では極性の反転は起こりませんから、回転を検知してフィールド側の電流の方向を反転させる回路を備えており、ブラシレスモーターと呼ばれています。また、ローターとフィールドにコイルを巻く方式にも、図1のような直列方式の他に、並列に巻く方式やその混合型、さらには電源も別にする方式などがあり、モーターに大きな負荷がかかった時の回転速度などに特徴がありますが、ここでは詳しい説明は省略します。
誘導型モーター
世の中で広く使われているモーターの中には、上で説明した直流モーターとは全く原理の異なる、もう一つのグループがあります。交流専用として使われる誘導型モーターです。
電線から供給される交流電源に単相交流と三相交流があることはご存知でしょうか。単相交流は2本の線で供給され、関東では1秒間に50回、関西では1秒間に60回、プラスとマイナスが入れ替わる(正確に言うと、プラス方向とマイナス方向の間で電圧が波状に変化する)お馴染みのもので、普通の家庭ではこちらしか使っていないと思います。これに対して三相交流は3分の1波長(1波長を360度として120度)ずつズレた3つの波が3本の線で供給されます。一般家庭ではあまり見かけませんが、ちょっと大型の機器では三相交流を使うものもあります。この三相交流が誘導型モーターを回すのに実に都合がよいのです。
誘導型モーターは図4に示すような構造をしています。ローターは図のようなカゴ型が基本で、その周囲に3組(赤、緑、青)のコイルが配置されています(ステーターと呼びます)。コイルの置き方としては、図4(a)や図4(b)のような方式がありますが、とにかく、120度ズレた3つの方向に磁界が発生するようになっており、赤、緑、青のそれぞれのコイルに、三相交流のそれぞれの線をつなぐのです。
図4 三相交流で回る誘導型モーターの基本形
このようなモーターに三相交流を流した時に、どのような磁界ができるかを見てみましょう。三相交流の各線の電圧は図5上のようになっています(横方向は時間の経過を示します)。この赤の波を赤のコイルに、緑の波を緑のコイルに、青の波を青のコイルにかけてやると、それぞれの方向でタイミングをズラして振動する磁界ができます。
図5 回転する磁界ができる様子
時間の経過に従って各方向の磁界がどのように変化するかを図5下に示しました。それぞれの瞬間瞬間で、赤、緑、青のコイルが作る磁界を、同じく赤、緑、青の矢印で示しています。一つの色だけに注目すれば、単にそれぞれの方向で直線的に振動しているだけです。しかし実際にコイルの中に置かれたローターが感じる磁界は、と言うと、これら3つを足し合わせたものになりますから、紫の矢印になるはずです。この紫の矢印をよく見てみましょう。大きさはいつも同じで、方向だけがぐるぐる回転していますね。つまり、「回転する磁界」ができているのです。3本の線の内の2本をつなぎ換えると、例えば緑と青とを入れ替えると、逆方向に回転する磁界ができます。
このような回転磁界の中にローターを置くと、変化する磁界の影響でローターの中に渦状の電流が発生し、その電流が磁界から力を受けて回転を始めます。例えば、回転磁界の前方では、次第に強くなる磁界を打ち消す方向に電流が発生しますが、その方向の電流は磁界から反発力を受けるので、より前方に弾き飛ばされるのです。ただし、磁界の回転とローターの回転はピッタリと一致することはありません。回転が一致してしまうと、ローターから見た磁界の変化がなくなりますから、それ以上回転力を得ることができなくなるのです(変化しない一定の磁界は誘導電流を発生しません)。ですから、ローターの回転速度は磁界の回転速度よりも少しだけ遅くなります。
回転力の源になるローター内の電流は必要な場所にだけ流れればよいので、余計な電流が余計な場所に流れないように、カゴ形になっています。カゴの隣り合う2本の柵と上下の環とで太い電線でできた回路を作っていると考えればよいでしょう。ただし、図4では本当にカゴの形のローターを描きましたが、実際のモーターでは、先の直流モーターの鉄芯と同じように、電磁鋼板を積層した塊の中に、導電性の高い銅などの棒をカゴ状に打ち込んだ形になっています。また、ローターがどの位置にいても始動できるように、導電性の棒はやや斜めに入っているのが普通です。(カゴ型ローターの代わりに永久磁石を使うこともできます。その場合は磁界に直接引っ張られて回転しますから、ローターの回転速度と磁界の回転速度がピッタリ一致することになり、同期モーターと呼ばれます。)
このように、三相交流を使うときれいな回転磁界ができるわけですが、それでは普通の単相交流ではダメでしょうか。実はそうでもないのです。例えば、指先にリングを引っ掛けてくるくる回すことを考えましょう。あるいはフラフープを想像してもらってもよいです。初めは確かに指や腰を回転させなければなりませんが、調子づいてくれば、単に直線的に往復運動させるだけで回転を続けることができますね。これと同じ理屈で、磁界の方向が直線的に変化する単相交流でも、調子づきさえすればローターを回すことができるのです。その調子づけるための工夫にはいろいろありますが、代表的な形が図6です。
図6 単相交流で動く誘導型モーター
ステーターとして2組のコイルがあり、それぞれに交流電源がつながれていますが、一方には抵抗が、もう一方にはコンデンサーが挟んであります。このようにすると、抵抗を流れる電流とコンデンサーを流れる電流は図のように波長の4分の1だけズレますから(
インピーダンスの話参照)、三相交流の時と同じような回転磁界ができるのです。
コンデンサーの代わりにコイルをつないでも同じような効果が得られます。その場合、コイルを流れる電流はコンデンサーの時とは逆方向に4分の1波長ズレますから、回転の方向は逆になります。また、図6の右に示したような隈取(くまどり)コイル型の誘導モーターもあります。見かけは図1の直流モーターと似ていますが整流子やブラシはもちろんなく、代わりに隈取コイルと呼ばれる太い銅線がステーター上の2箇所、または4箇所に巻かれています。ステーターのコイルに交流を流すと、隈取コイルの中を変化する磁界が通ることになります。すると、その磁界の変化を打ち消す方向に隈取コイルに電流が流れてその部分の磁界を弱めますから(磁界に影を作るという意味で「隈取」です)、本来の左右方向とはタイミングがズレた斜めの方向にも磁界の変化が発生し、回転力が得られるのです。
ステッピングモーター
誘導モーターや同期モーターでは回転磁界は交流の特性を利用して作っていました。この方式では、回転数は交流の周波数で決まりますから、回転数を変えるには交流の周波数を変更しなければなりません。そこで、交流に頼るのではなく、電気回路によってパルス信号を発生させてステーターの磁界を切り換える、という考え方が出て来ます。つまり、ローターの周りをぐるりと取り囲んだコイルに順番に電流を流して行けば、それにつれてローターがカクカクと回転する、ということです。これがステッピングモーター(パルスモーター)の基本です(図7)。ステーターの各コイルに順番に電流を流して行けば、(a)のように1ステップでステーター1個分動きますし、(b)のように1個、2個、1個と切り替えれば、1ステップでその半分の動き(つまり半分の回転数)になります。
図7 カクカク動くステッピングモーター
しかし、図7のようなカクカク状態ではあまりにもぎこちないですね。見た目に滑らかな回転をするには、1ステップで動く角度は1度とか2度ぐらいにする必要があります。そのためには、ローターの周りに200個や300個のステーターコイルを置かなければならないような気がしますが、実はもっと少ないコイルで1度や2度のステップを実現するうまい方法があるのです。それは、図8のように、ローターとステーターに突起をつける方法です。
図8 実際のステッピングモーターの動作
ローターの突起とステーターの突起とは、その位置が微妙に違っています。あるステーターの突起とローターの突起がピッタリ合っている時に、隣のステーターの突起とローターの突起はちょっとだけズレているのです。図8左の場合ですと、ステーター1の突起はローターの突起と合っていますが、ステーター2やステーター3ではズレていることがわかると思います。
初めにステーター1のコイルに電流が流れているとしましょう。ローターはこのステーターに引きつけられて、それぞれの突起が顔を突き合わす形で固定されます(図8左)。ここで電流をステーター2に切り換えてみましょう。ステーター2の突起とローターの突起は少しズレていますから、突起どうしが引き合う力でローターが少しだけ回転し、突起と突起がピッタリ合った位置で止まります(図8中)。この時、ステーター3の突起とローターの突起はまだちょっとズレていますので、次に電流をステーター3に切り換えると、またまた少しだけ回ります。このようにして、1段階でステーターの間隔よりもはるかに小さなステップを刻むことができるのです。
ステッピングモーターは、その原理からわかるように、回転精度が非常に高く、また、電流の切り換えをしなければローターが固定される(回転軸に外から力をかけても動かない)、という特徴もあります。このような性質を利用して、正確に一定角度だけ回って止まる、というような動きが要求される用途、例えばロボットの動力や天体望遠鏡のモータードライブなどに使われています。ただし、弱点もあります。普通の直流モーターでは、大きな電流を流すと回転が速くなり、力も強くなりますが、ステッピングモーターではそうは行きません。回転を速くしようとすれば、ステーターに流す電流の切り換えを速くしなければなりませんが、電流やそれに伴う磁力は瞬間的にパッと大きくなるのではなく、最大になるのに少し時間がかかります。そのため、あまり速く切り換えると、磁力が十分に大きくならないうちに次のステーターに電流が移ってしまうことになり、大きな回転力が得られないのです。つまりステッピングモーターには「高速回転させるほど力が弱くなる」という宿命があるのです。外に取り出せる力が弱くなるだけではありません。力が弱くなりすぎると、自分自身のローターすら回せなくなり、ステーターの磁界はどんどん回転して行くのにローターの回転は全くついて行けない、という事態にもなってしまいます。ステッピングモーターは元々回転の正確さを売りにしているモーターですから、高速回転には向かないのです。
リニアモーター
これまで説明して来たモーターは全て回転運動を得るタイプのもので、磁力を発生させるステーターが回転軸を持ったローターの周りを取り囲んでいる構造でした。これを切り開いて平らに伸ばすと、直線運動するモーターが作れます。これがリニアモーターです。図9に、普通の回転モーターとリニアモーターを比較して示しました。
図9 回転モーターを開いたのがリニアモーター
図9(a)が回転モーターです。ローターの回転に応じてステーターの磁界の向きを切り換えて、連続で回転するようにしてあります。この図では磁界の切り換えの機構は省略していますが、これまでに説明して来たように、ブラシと整流子の接触で機械的に切り換えたり、交流を利用したり、あるいは電気回路を使って発生させるパルス信号で切り換えたり、という方法が採られています。図9(b)のリニアモーターも実は同じことで、平らなステーター上に並べられた電磁石の極性を切り換えることで、その上に乗っている磁石(回転モーターのローターに対して、スライダーとでも呼びましょう)を横に動かすのです。極性を切り換えるのにも、回転モーターと同じ方法が使えます。スライダーにブラシのようなものを取り付けて機械的な接触で切り換えることもできますし、適当な周波数の交流を使うこともできます。電気回路を使う方法ももちろんOKです。また長いステーター全体を磁石にする必要はなく、スライダーの近くのコイルにだけ電流をパッパッと流してやればよいのです。
もっとも、図9(b)の状態ではスライダーがステーター上にペタッとくっついてしまいますから、回転モーターの軸受けに相当する案内レールが必要になります。あるいは、別の磁石を使ってその反発力で浮かせる方法もあります。鉄道車両のリニアモーターカーはこの方式ですね。ただ、この磁気浮上の部分があまりにも有名なために、「リニアモーターカー」=「磁気浮上方式」という感じになっていますが、リニアモーターそのものと磁気浮上とは全く別モノであることに注意してください。
超音波モーター
回転モーターにしてもリニアモーターにしても、その力の源は磁力でした。ところが、磁力を全く使わないモーターがあります。カメラのオートフォーカス機構などに使われている超音波モーターです。このモーターは図10のような構造をしています。
図10 磁力を使わない、超音波モーター
円環状のステーターの上に、やはり円環状のローターが乗っています。ステーターの下面には、電圧によって伸び縮みする
圧電素子がずらりと取り付けられていて、これにタイミングをずらせた交流をかけることで、一方向に進む波ができるのです。ちょうどスポーツスタジアムの観客席でウェーブが起こるような感じでしょうか。この波の周波数が20kHzを超える超音波の領域にあるため、超音波モーターと呼ばれるのです(
音の話参照)。
ステーターの表面は、波の谷底では横方向に押し縮められ、波の頂上では逆に横に引き伸ばされます。ゴム製ならばともかく、硬いセラミックスや金属ではそれほど伸び縮みできませんから、あまり大きな波は作れません。そこでステーターの表面には図のようにたくさんの溝が切ってあります。こうすることで横方向に切り離されますから、ある程度自由に隣どうしが近付いたり離れたりできるようになり、大きな動きが実現できるのです。
ところで、よく知られているように、波というのはパターンは伝わりますが物質は伝わりません。一点に着目すれば、ほとんど上下に動いているだけです(観客席のウェーブでも、一人一人の観客はただ立ち上がったり座ったりしているだけで、隣の席に移動したりはしません)。それなのになぜローターが回るのでしょうか?その秘密は、波の上面の微妙な動きにあります。
図11 波の頭の微妙な動きがローターを運ぶ
図11を見てください。ステーターに発生した波のパターンは左から右に動きます。この時ステーター上の一点に着目してみると(例えば図の中の●)、波の進行方向とは逆に回転する楕円を描いていることがわかります。ローターに接触するのは波の頭の部分だけですが、この部分だけを見れば、波の進行方向とは逆に、ほんのわずか右から左に動いているのです。このような動きは、ただの平らな面に波が発生した時にも起こりますが、溝があった方が動きが大きくなることは、先に説明した通りです。その結果、この上にローターが乗っていると、波の頭の横運動に運ばれて、波の進行方向とは逆向きにローターが移動することになるわけです。波の頭が横に動く距離はせいぜい数ミクロン程度です。しかし振動が速いですから、例えば50kHzの場合は1秒間に5万回振動しますので、10センチ以上の移動ができます。
超音波モーターは鉄芯などがありませんから小型軽量で、低速回転での力が強く、騒音も少ない(超音波は聞こえませんから)、などの特徴があります。また摩擦で動きを伝えるためにローターがかなり強くステーターに押し付けられているので、ステッピングモーターと同じように、止まっている時にブレーキがかかりますし、(スリップさえしなければ)回転角度の制御も容易ですから、必要な角度だけパッと動いてピタッと止まる、という動作に適しています。その一方で、他のモーターのようにブンブンと高速で回るのは苦手なのです。
生物が持つモーター
最後に、ちょっと中身が違いますが、微生物が持つ鞭毛モーターについて触れておきましょう。人間などでは、例えば肩の関節で腕をぐるぐる回すことができますが、腕自体の向きは一定以上は変わりません。皮膚や血管がつながっている以上は、モーターのように回転させることは不可能です。ところがサルモネラ菌などのある種の細菌の中には、本当に回転する機構を備えた尻尾(鞭毛)を持っているものがあるのです。図12にその構造を模式的に示しました。
図12 本当に回転する、鞭毛モーター
軸受けを持った車輪の構造は人間の大発明の一つだと言われていますが、なんと1ミクロンほどしかない微生物が、ちゃんと軸受けの付いた回転機構を持っていたわけです。人間が作るモーターのほとんどは電気エネルギーで動きますが、この鞭毛モーターの動力源は化学エネルギーで、効率は100%近いようです。ホタルの発光もそうですが、とにかく生物の持つ機構というのはムダがない、完璧なものが多いですね。ついでに言うと、動物の筋肉も、細かく見て行けば繊維状の微細な組織のレールの上を、化学エネルギーを使って別の繊維状組織がスライドするという仕組みで動いています。1個1個の動きは小さく、力も弱いですが、これが何十万個も連なり、何十億本も束になることで、素早い、力強い動きを実現しているのです。鞭毛モーターが化学エネルギーを使った回転モーターであるのに対して、筋肉は同じく化学エネルギーを使ったリニアモーターというわけです。
雑科学ホーム
hr-inoueホーム